|
|
| Inovação |
|
|
Planejamento e uso de sistema de GPS na realização de próteses de ombro Por Luciano Pascarelli |
|
A realização de próteses de ombro tem crescido exponencialmente nos últimos anos, sendo que a prótese reversa tem ganhado mais espaço na nossa realidade. O lado negativo deste aumento de volume cirúrgico é que as complicações estão crescendo e, consequentemente, o número de reoperações também. Na prótese reversa, as forças de carregamento são transferidas ao componente glenoidal. Como consequência desta sobrecarga, a soltura da glenóide é uma das principais complicações. Alguns fatores auxiliam para evitar estas complicações. O mais básico deles é o conhecimento anatômico seguido do conhecimento do material a ser implantado. Nos estudos atuais conseguimos mostrar que isto não é suficiente. O planejamento pré-operatório com tomografia 3D é mais específico para cada paciente e, com o auxílio do guia impresso individualizado, tornam a performance cirúrgica mais precisa e controlada. O uso da navegação com GPS associado ao planejamento cirúrgico 3D tem provado ser uma técnica mais precisa ainda, reprodutível e eficaz. A técnica auxilia o cirurgião a entender melhor a superfície óssea da glenóide e consequentemente melhorar o posicionamento da glenóide. No artigo “Accuracy and precision of placement of the glenoid baseplate in reverse total shoulder arthroplasty using a novel computer assisted navigation system combined with preoperative planning: a controlled cadaveric study”, Jones RB mostra que o posicionamento da glenóide, referente a inclinação superior e inferior, varia aproximadamente 12 graus com instrumentais básicos, 6 graus com o uso isolado do planejamento 3D e 2 graus com a navegação. Com relação a versão anterior e posterior, varia 11 graus com instrumentais, 6 graus com planejamento e 2 graus com navegação. Um dos modelos de planejamento e navegação por GPS existente no Brasil é o da empresa Exatech. Além do software para o planejamento, são necessários probes e sensores implantáveis e móveis para navegação, uma câmera e uma tela touch screen. Para o uso no centro cirúrgico é necessário fazer uma calibragem dos sensores com a câmera antes do início da cirurgia. A incisão cirúrgica tem que ser estendida proximalmente para permitir a exposição do coracóide e fixação de um dos sensores com dois parafusos. Uma exposição ampla da glenóide deve ser feita e pontos específicos são marcados para o reconhecimento da superfície articular. (colo anterior da glenóide, colo inferior da glenóide, lábio posterior da glenóide e pontos cardinais da superfície articular). Com a imagem intraoperatória reconhecida, o sensor vai indicar o posicionamento correto do implante com a visualização na tela e orientando a correção dos desvios angulares, através de um sensor no aparelho de perfuração. Após a colocação e verificação do implante, os sensores são retirados e a cirurgia concluída.
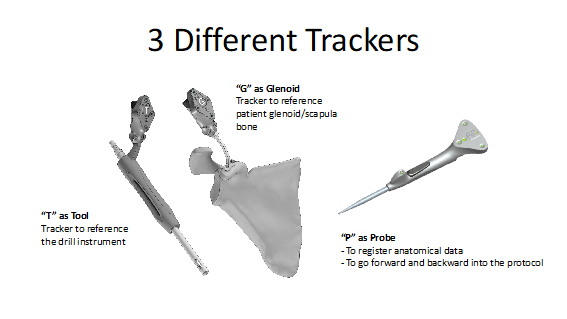
Sensores (referente ao perfurador, implantável no coracóide, probe para marcar a glenóide).
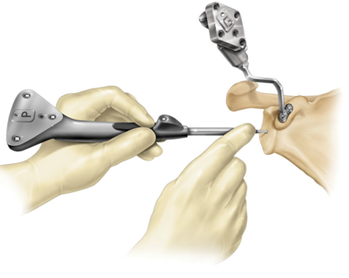
Posicionamento do sensor no coracóide e probe marcando o centro da glenóide
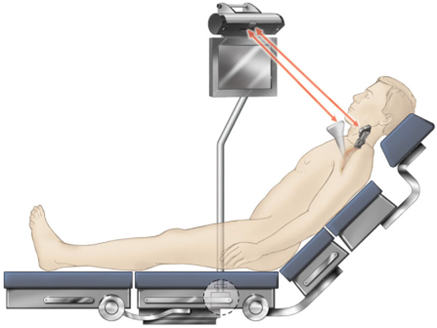
Posicionamento da tela e câmera de forma que permita a leitura dos sensores
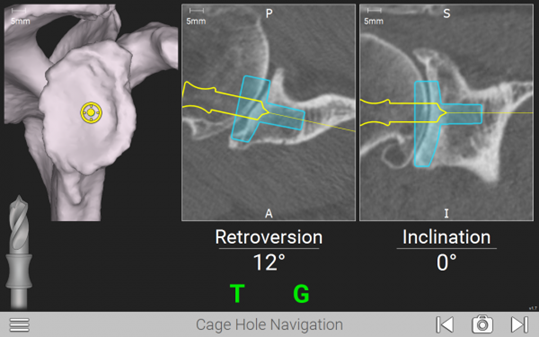
Visualização do sensor e orientação da perfuração em tempo real
Como todo avanço tecnológico, precisa de uma curva de aprendizagem para o melhor manejo do equipamento, além do custo inicial mais alto para aquisição do equipamento. Um estudo recente multicêntrico “Two-year clinical outcomes and complication rates of glenoid components in anatomic and reverse shoulder arthroplasty implanted intraoperative navigation”, com a participação do Dr. Bruno Gobbato, Dr. Zuckerman entre outros, mostra que após dois anos de seguimento, o uso de navegação intraoperatória é seguro, com poucas complicações operatórias e tem resultados similares e até melhores que as técnicas tradicionais. |
|
|
 |